昨日電験3種機械でY-△始動の問題を解いてみて、ふと思った事を書いてみます。
↓私の経歴については過去記事を参照してください。電験2種持ちで66kV受電工場の電気主任技術者として働いており、電験1種取得を目指している状態です
Y-△始動って工場ではモータの始動によく使うんですが、理論面と実機の制御を実務で上手く説明できてないな、感じました。
R4上期電験3種機械問2
— 電気カニ (@DenkenCrab) 2022年12月14日
三相誘導電動機のY-△始動に関する計算問題
試験時は「Y結線始動時は電流値が1/3になる」で良いんですが、原理をキッチリと復習しました
2次試験の筆記とかでベクトル図を描くのが苦手なので、少しずつ克服していきます👍🏻#電験3種 #機械 pic.twitter.com/svT2xQPqSX
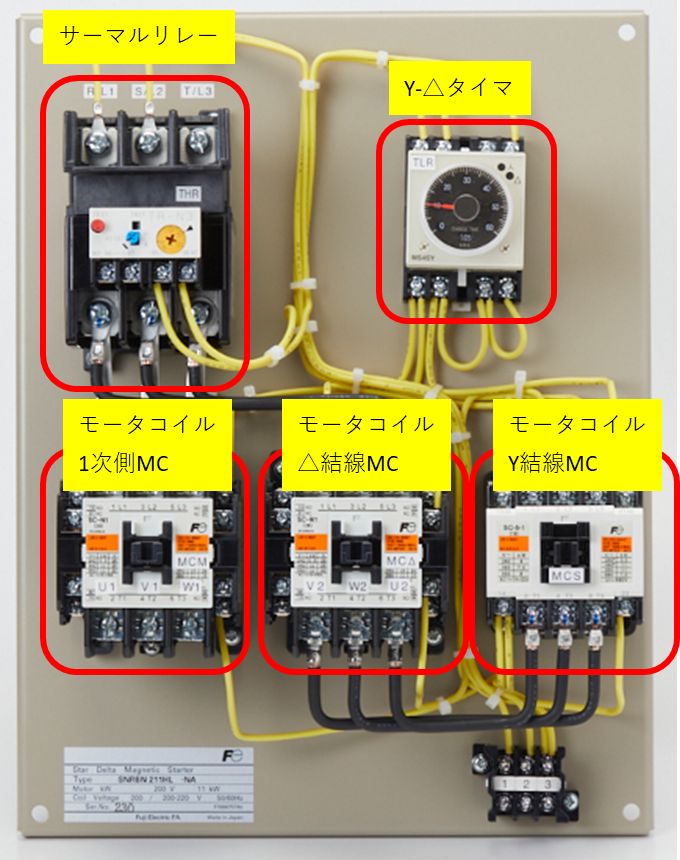
というわけで富士電機のY-△始動盤をベースに説明資料を作ってみます!

各部品の説明。サーマルはMCの1次側に配置されます。
Y結線MCの上に短絡用金属バーが付いているのが特徴的ですね。
右上にY-△タイマがあり、始動時のY結線→△結線の切り替え時間を設定することができます。
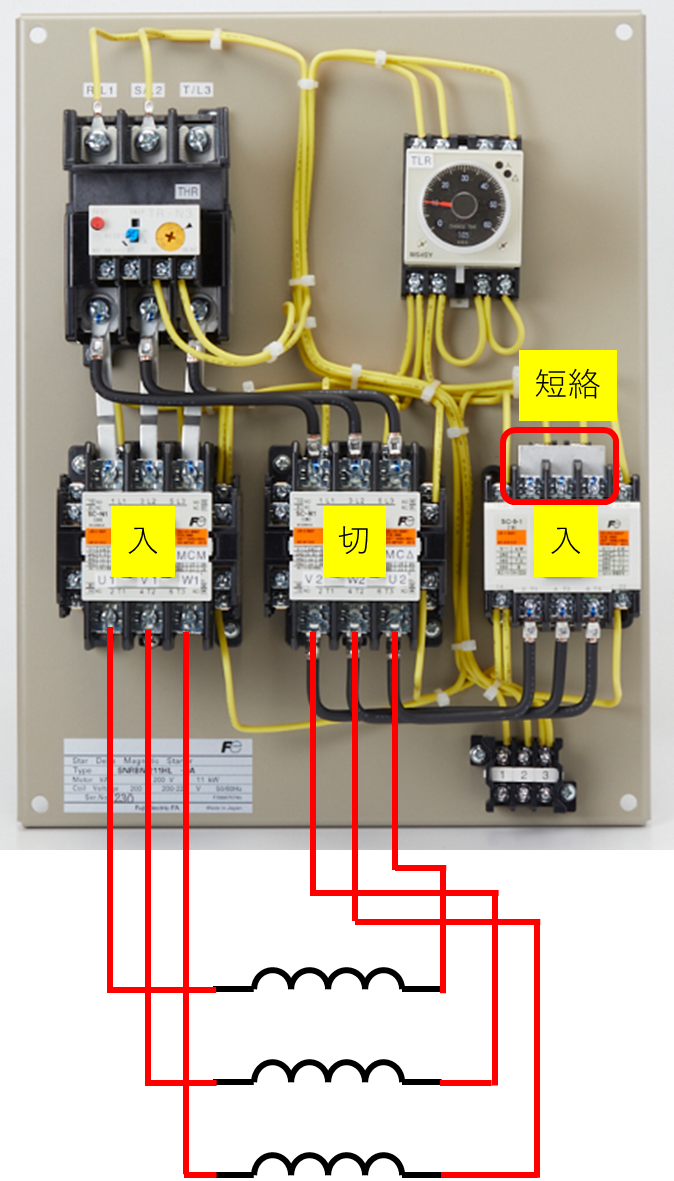
Y結線始動時
モータコイル1次側MC「入」、Y結線MC「入」となりモータが始動します。
モータコイル2次側の配線は△結線MC2次側に繋がっていますが、△結線MC「切」なので渡り線が繋がっているY結線MC側の回路に繋がります。
モータコイル2次側が短絡される事でY結線となり、モータコイルにかかる電圧値は線間電圧÷√3となります。
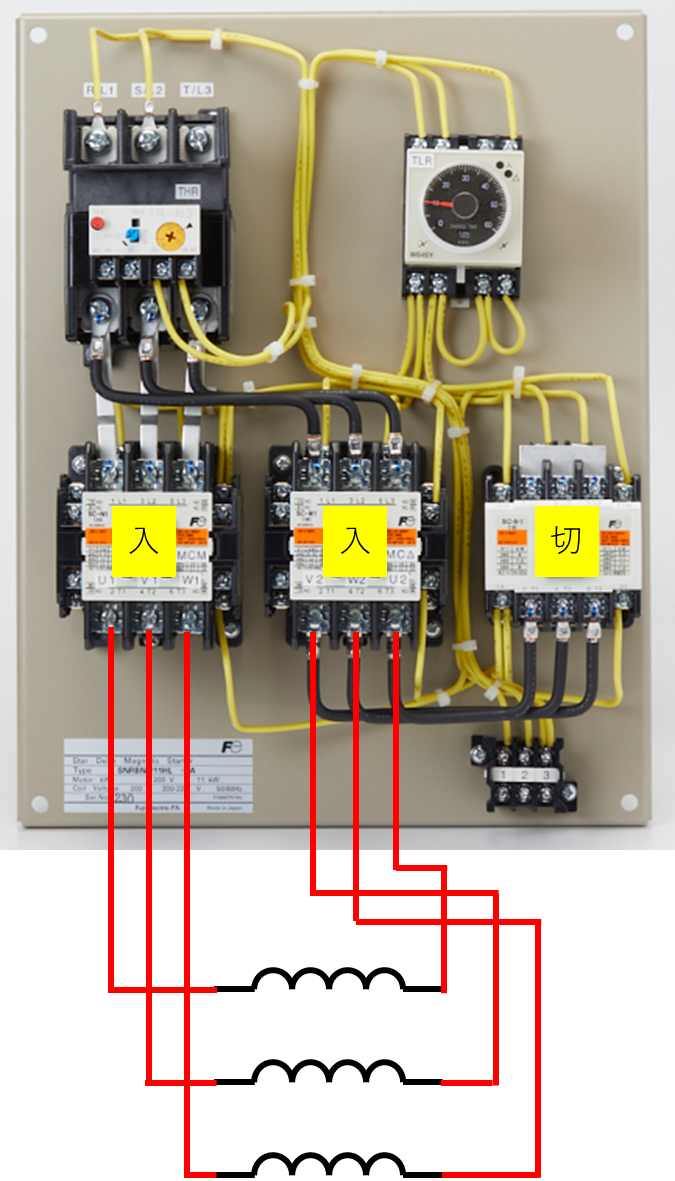
△結線運転時
モータが始動して回転が安定し、Y-△タイマーが動作するとY結線MC「切」となり、少し間をおいて△結線MC「入」になります。
モータコイルにかかる電圧値=線間電圧となり、定格トルクを発揮する事ができるようになります。
△結線に切り替え後、再度モータの回転が安定したら負荷をかける事ができます。
この盤の1次側にはブレーカがありますが、モータの始動時やY→△切り替え時に突入電流が流れるので、定格電流に余裕を持たせるか、突入電流対策がされたモータブレーカ等を使う事が求められる場合もあります。
過負荷などでサーマルが動作すると全MC「切」となりモータが停止します。
過負荷要因を取り除き、サーマルをリセットしないと再起動はできません。
(操作位置とY-△始動盤が離れた位置にあると大変です😂)
というわけでモータのY-△始動順序について説明してみました!
これからも電気設備のノウハウについて発信していければと思います。
![]()